A world’s leading automotive Tier 1 supplier once hired our Automotive Software Team to build two instrument clusters for two of the biggest car manufacturers globally. There was no clarity in regard to the specifications and the technologies. In addition, we had to work in a 100% distributed environment where communication and constant synchronizing with other teams were the key elements for success.
In particular, our rinf.tech team was responsible for the following jobs:
- Embedded programming in C,
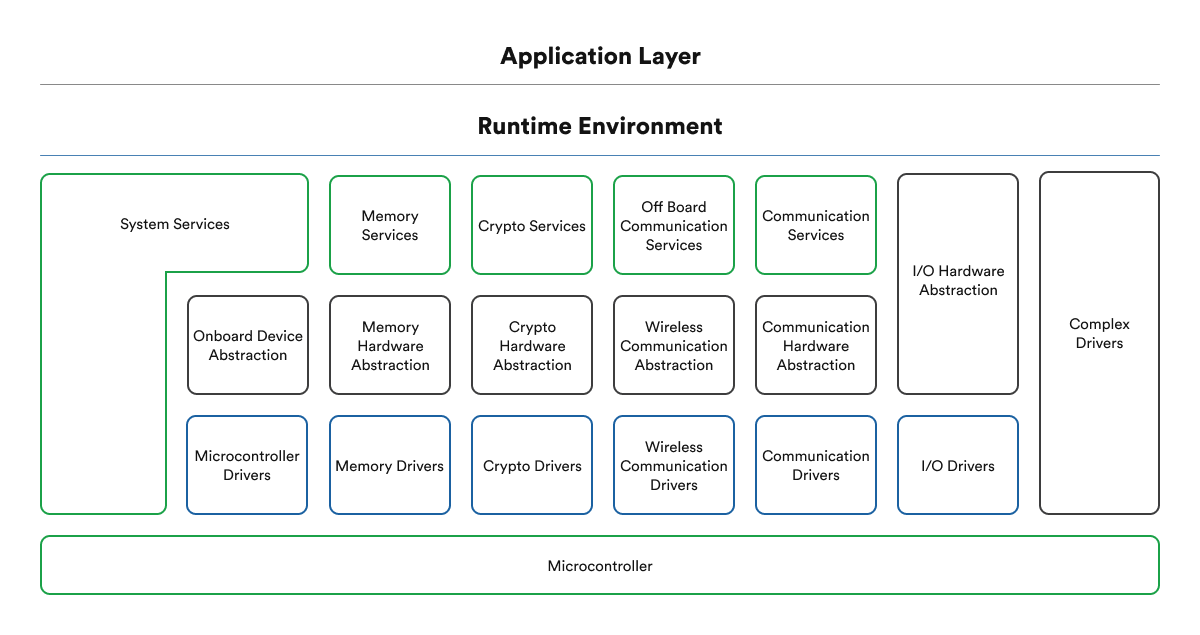
- AUTOSAR modules integrations,
- Hardware bring-up for new Hardware Instrument Clusters,
- Vector tools for AUTOSAR.
To support our client in their automotive dev journey, we engaged engineers with different skillsets to work together using an Agile methodology, Cycle-V process and following ASPICE policies.
We divided the project team into three subteams, and assigned certain tasks to each:
Applications Team:
- Illumination – controls the PWM for led
- Pointers – controls the pointers (speed, RPM)
- Button – handles the input from Board Computer button
- Check Controls – controls the fault indicators
- Dimming – controls the intensity of the PWM
- Odometer – counts the trip and the total kilometers traveled
- TMM – time control
- Board computer – consumption, trip info, range
- LDM – adaptive cruise control, dynamic cruise control Tasks for Drivers Team
- Complex device drivers (MCU, Head-up Display, Real Time Clock, Sound, InputOutput Controller)
- SAFETY Controller
- CAN Wrapper
- Diagnostics
- Power Management
- Inter-processor Proxies (between Control and Graphics Processors)
- AUTOSAR Core Components integration and configuration
- Hardware Bring-up
Real-time Operating System (RTOS) Team:
- CAAM crypto driver for iMX6
- AVB stack
- RDA encryption
- MOST communication
- IPSEC certificates
- SOMEIP components
- NAND/NOR/Filesystem code
- Integrity OS
- DLT
- IPC encryption
- HUD
- HMI
- VideoDecoder/Renderer updates
- CoreDump implementation
- CarModel code
- Bootloader code
Drivers Team:
- Complex device drivers (MCU, Head-up Display, Real Time Clock, Sound, InputOutput Controller)
- SAFETY Controller
- CAN Wrapper
- Diagnostics
- Power Management
- Inter-processor Proxies (between Control and Graphics Processors)
- AUTOSAR Core Components integration and configuration
- Hardware Bring-up
As a result of using AUTOSAR, we achieved:
- 50% faster deployment of new features,
- 100% compliance with our client’s tools, standards, processes and methodologies,
- Record time in taking over the ownership of two major projects, which allowed the client to focus on more pressing deliverables.
Read more about the project here.